Module principal (processeur / routeur / serveur)
CysBOX
CysBOX est l’unité centrale de l’ensemble CysBOX System, « cœur » du système, qui offre des fonctionnalités avancées basée sur des applications logicielles adaptées : autopilote, gestion d’alarmes …, et les logiciels de gestion et de navigations les plus répandus (serveur signal-K, cartographie, …).
Un écran tactile durci IP65, un clavier USB ou Wireless permettent de disposer d’une unité de gestion complète pour le contrôle du bateau et la navigation.
CysBOX : principales caractéristiques
- Processeur :
- ARM quadricœurs à 1,5GHz (Raspberry Pi4B)
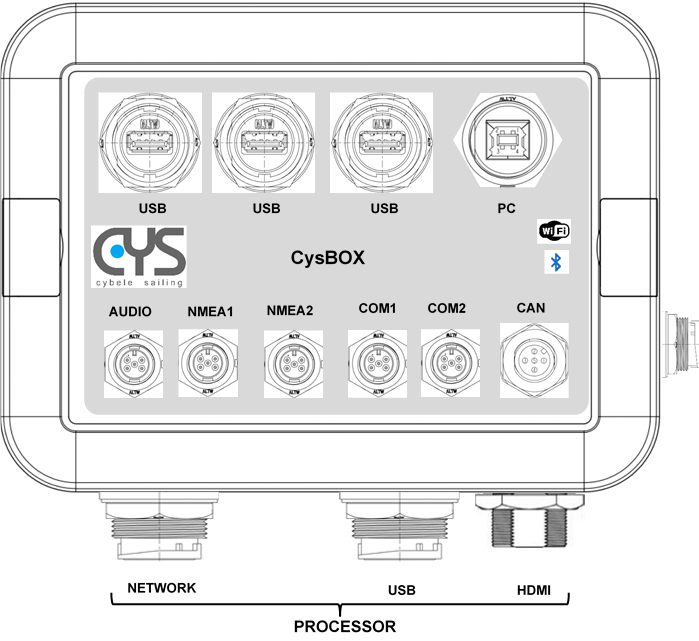
- Connectivité :
- USB : 3 x USB « Host »
- PC : 1 x USB « Device »
- NMEA1, NMEA2 : 2 x NMEA0183
- COM1, COM2 : 2 x liaisons série HS (1 Pilote, 1 GP)
- CAN : 1 x NMEA2000
- AUDIO : 1 x Analog/Audio
- HDMI : 1 x Video (écran externe optionnel)
- GPS : 1 x SMA (antenne GPS active)
- RF : 1 x SMA (antenne RF télécommande)
- LAN : 1 RJ45 Gigabit/Ethernet
- Fonctionnalités internes :
- Slot Pi4B :
- I/O 40 et USB3
- Gestion d’alimentation
- Gigabit/Ethernet et Wifi
- Bluetooth
- HUB USB (1 port réversible pour connexion PC)
- GPS : fréquence de mise à jour jusqu’à 18Hz (U-Blox)
- IMU 9 axes : fréquence de mesure 10Hz (BNO085-Hillcrestlabs)
- RF433Mhz : télécommande du pilote CysRC (RFM69)
- UART HS :
- NMEA2000 (Passerelle CAN ATMEGA64M1)
- NMEA0183 (2)
- Port série HS (2 dont liaison pilote CysPWR)
- Interface radio 433MHz (dédié à la télécommande pilote CysRC)
- Interface Analog/Audio
- Slot Pi4B :
- Applications :
- Pilote (CyPilot)
- Alarmes vocales (CyAlarm)
- Applications open source compatibles Raspberry OS
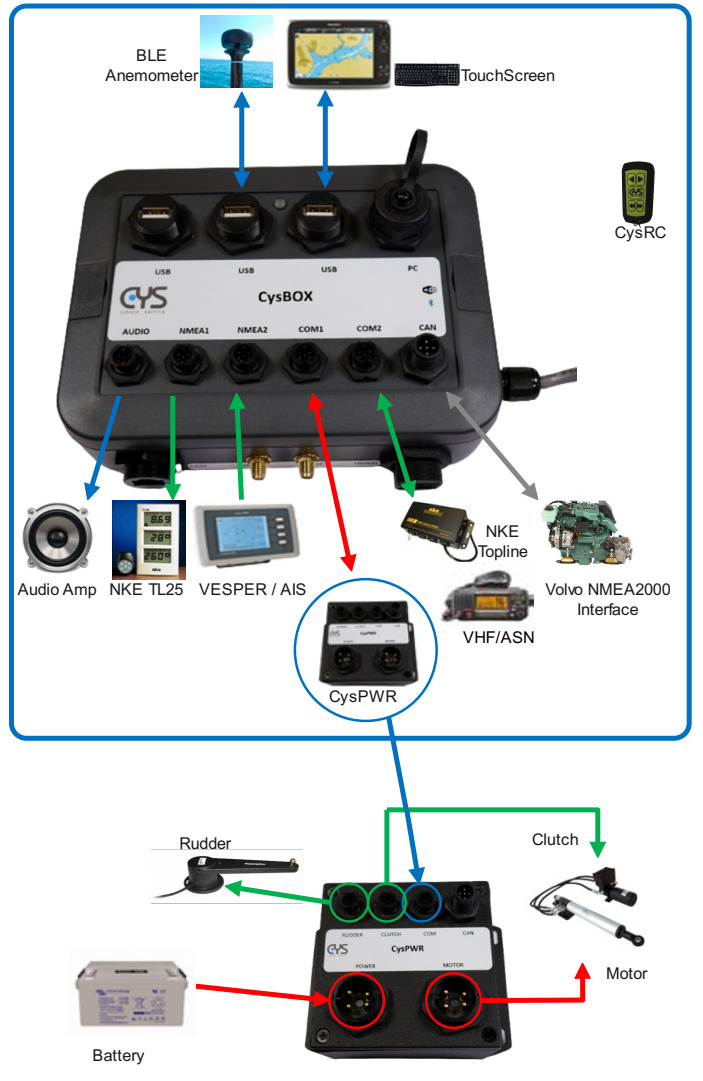
Exemple d’installation :
Beaucoup de tests de développement et de validation ont été réalisés en navigation en Méditerranée avec un voilier A40 dans la configuration suivante :