CysBOX compatible software
CysBOX is an open system which allows the use of numerous software: autopilot, navigation, routing… Some software is available under open-source license.
Software specifically adapted to the CysBOX system:
CyPilot :
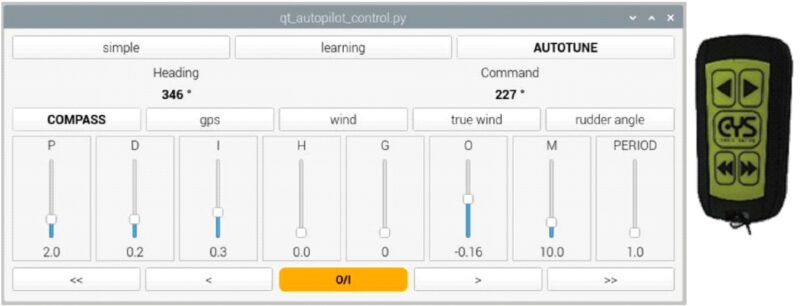
This software, combined with the CysPWR helm control module, offers autopilot features and has been extensively tested in real navigation. It is more specifically designed for sailboats, with a focus on performance, reliability and adaptability to the boat and its environment:
- Multiple modes of operation: compass heading, GPS heading, real wind, apparent wind, rudder angle, …
- Different processing algorithms: “simple” with basic PID, “auto-tuning” with automatic selection of PID parameters according to conditions, “auto-learning” with a self-learning module
- High-speed data acquisition: GPS up to 18Hz, Wind up to 10Hz, IMU, …
- Remote control 433MHz IP68
The CyPilot software was developed with the aim of optimizing the CysBOX platform and ensuring the best performance in all navigation conditions. The software is available under an open-source license, it includes code subject to the GNU General Public License (“GPL”), Version 1 / Version 2 / Version 3 or GNU Lesser General Public License (“LGPL”), in particular pypilot …. Initially based on the pypilot application, development and testing have led us to evolve towards different technical solutions (IMU, direct rudder angle control, processing algorithms, sensors, etc.). In order to comply with the terms of the GPL, the machine-readable source code of software subject to the GPL may be obtained upon request.
CyAlarm :
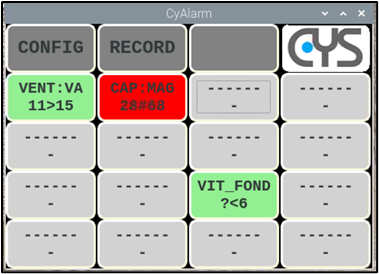
The CyAlarm “voice synthesis alarm reporting system” assists the skipper to monitor the main parameters available on the boat, from the different sensors: wind, depth, loch, …
Alarm messages are played on the Audio output of the CysBOX system to be mixed with the audio output of the on-board VHF, and to be transmitted to the cockpit speaker.
Other compatible software:
qtVlm : This is our preferred solution for navigation, routing, … The sofware can be easily configurated to interface via TCP with CyPilot acting as a multiple-sensor gateway and concentrator.

The combination CyPilot + qtVlm is used on our main testing sailboat, an A40 sailboat. The software can be directly installed on the internal Raspberry Pi4 processor. https://www.meltemus.com/index.php/fr/
SignalK server : The installation of the SignalK server makes it easier to manage the various information from the sensors and the autopilot software. https://signalk.org/
Note that SignalK server can be optionnaly installed when using the CyPilot installation procedure.
OpenCPN : The CysBOX system also allows the use of navigation software such as OpenCPN that can be either directly installed on the internal Raspberry Pi4 processor or on a PC. https://opencpn.org/
Notes :
- CysBOX: The software includes parts of code published under the MIT license, notably for the NMEA2000 gateway (NMEA2000 / Copyright (c) Timo Lappalainen), the IMU interface (Copyright (C) Ladyada for Adafruit Industries), …
- CysBOX: The software includes parts of code published under GPL license, notably for the integrated NMEA2000 gateway, the CysPWR (Arduino Core for ATMega64) power interface, the CysRC (RadioHead Packet Radio library) remote control, …
- CyPilot: The software includes parts of code published under GPL license, notably for the autopilot server (pypilot Copyright (C) Sean D’Epagnier), …
- CyAlarm: The software is the result of a development carried out during the preparation of the sailboat Nacira 6.50 Coeur Fidele-721 for the MiniTransat 2015.
The CyPilot software contains software developed by third parties, including code licensed under the GNU General Public License (“GPL”), Version 1 / Version 2 / Version 3 or the GNU Lesser General Public License (“LGPL”): you may use the software provided that you follow the terms of the GPL.
In order to comply with the terms of the GPL, the machine-readable source code of the software licensed under the GPL may be obtained upon request.